豚工证培训时,配合AGV项目现场调研要点。
配合项目需求调研表一起研讨。
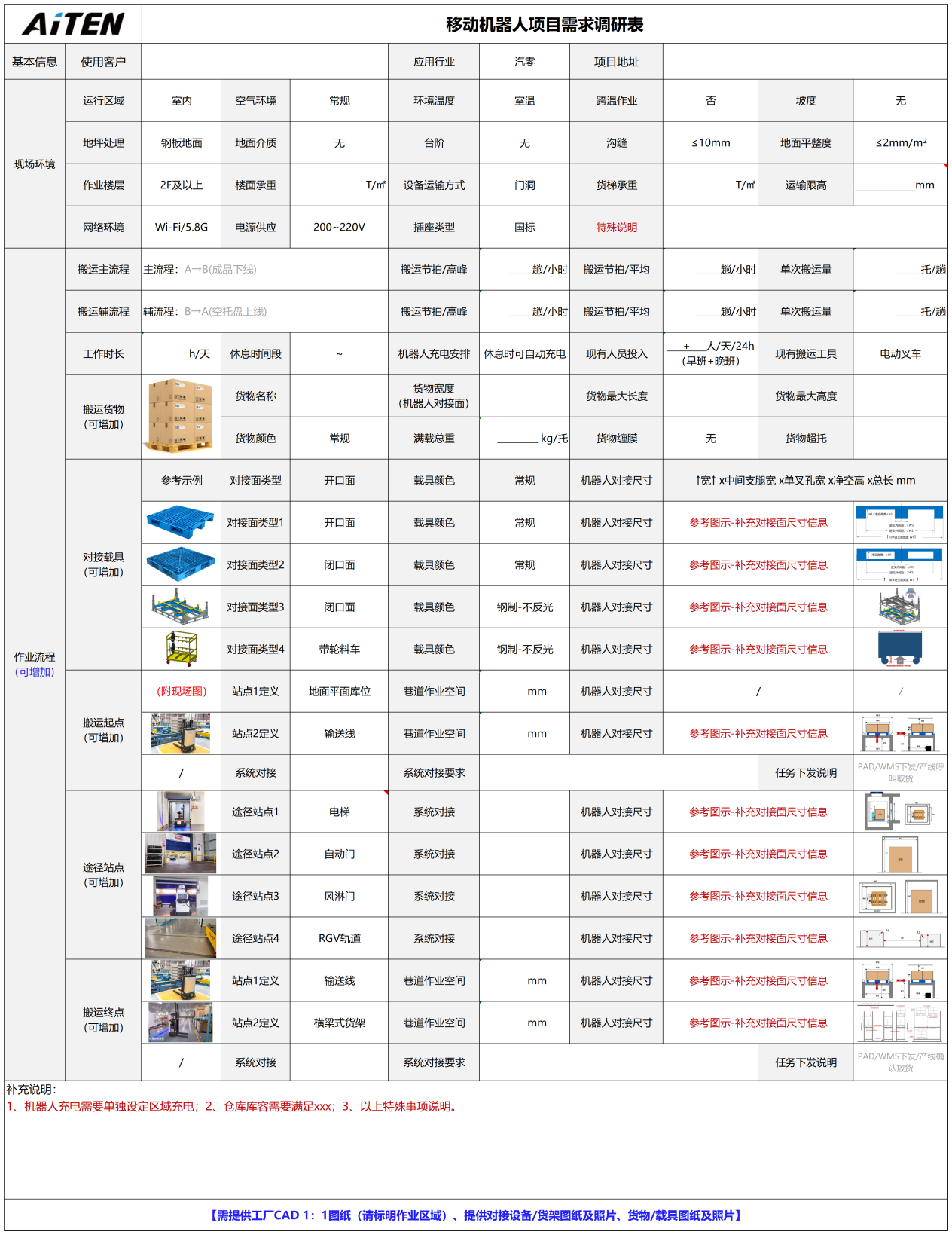
首先我们先来看现场环境这一部分
运行环境
决定着我们的导航方式、车体的结构设计等要求。室内是我们常规的运行环境,而涉及室外时,就要确认是半室外还是纯室外,行业内大部分AGV厂家都是做的纯室内作业,以及跨厂房周转,跨厂房周转的一定要保证有防雨连廊才可以。另外涉及室外时一定要视频录制环境情况进行评估。
空气环境
空气环境这部分我们要看现场有没有粉尘,空气中的粉尘会污染传感器装置,造成AGV无法正常导航、避障等,地面的粉尘会有打滑的风险,面粉类的会爆炸,石墨粉会导电,等等。还有水雾、铁屑等都是需要我们注意的物质。
温度
这部分我们要注意一些特殊的温度情况,如季节性温度、冷冻库、跨温差等情况。都需要根据现场的情况进行可行性的评估。
坡度
大部分车型的满载可通过坡度为3%,空载可通过坡度为5%,当然如果坡度值比这个大的话怎么办?我们可以模拟坡度进行实际的测试来判断能否正常通行。另外要主要这里的坡度是3%,不是3°,一定要注意3%约等于1.6°。
地面
常见的地面都是适合AGV运行的,比如金刚砂、环氧地坪等,但有一些地面时不利于AGV运行的,比如钢板地面,会有热胀冷缩、打滑等情况。像沥青路面,可能就需要更换成橡胶轮胎才能减小轮子的损耗。
地面介质
尤其要注意水渍、油渍等情况,会导致AGV运行过程中打滑,从而导致定位丢失以及精度降低。
沟缝台阶
我们舵轮AGV可以通过的沟缝宽度为10mm,高低差为3mm。差速轮的要求会更高,但有一些特殊情况时,也可以实际进行测试判断。
地面平整度
AGV的正常运行,一定是需要地面的平整度小于等于5mm/㎡,如果涉及高精度要求时,那地面的平整度小于等于2mm/㎡甚至更低才可以满足。
作业楼层
我们需要确认AGV是在一层运行,还是在二层或者其他楼层。这会涉及着楼面承载,因为普通的搬运车重量在几百公斤,但是像重载堆高车、平衡重等AGV,自身重量就达到2吨、3吨以上。所以一定要考虑楼面承重能否达到要求。
设备运输方式
这个主要的调研目的是要看AGV进场时是否需要经过门洞,门洞的高度宽度是否会影响AGV进场,以及是否需要经过电梯,电梯的空间以及承重能否满足AGV的进场。
网络环境
AGV是需要通过网络与调度系统进行实时通讯才能正常的执行任务,所以需要确认客户现场是否有WIFI、如果没有就需要进行网络的搭建。或者是配置5G网络模块通过5G信号进行通讯,但要注意确认使用哪家运营商的信号卡,以及月租费用的承担。
电源供应和插座类型
海外不同的国家的电源供应是不同的,这个遇到海外项目是需要特别注意的。涉及到我们配置变压器或者定制插头。
现场环境的部分内容主要是这些,接下来我们来看第二大部分:作业流程
首先我们要看作业流程,主流程指的是我们的主要作业任务的流程是什么,如产品末端输送线搬运成品到自动打包区。辅流程指的是什么呢?比如我原材料运送到产线后,可能需要空托盘的回收,这个就是辅流程。另外还有一个要注意的点,我们要清楚主流程和对应的辅流程是否同时进行。
节拍
我们知道了作业流程后就要询问客户的作业节拍,因为有了作业节拍我们才能计算出到底需要多少台AGV才能满足客户的需求。这里我们要注意一点,有的项目涉及平均节拍和高峰期节拍,如果有高峰期节拍那我们在计算数量时就要按高峰期节拍去计算,这样才能在高峰期作业时满足客户的需求。另外一个点就是单次任务搬运托数,比如单拖叉取、双托叉取等等,这同样是影响数量测算的一个关键信息。
工作时长
这个也是一个比较重要的信息,它关系到我们AGV的数量以及充电桩的配比。有的客户他是24小时工作的,也有的客户是一天8小时,8小时又分为有集中充电时间和无集中充电时间(也就是休息时间段),这个要注意清楚。
现有人员投入
主要就是他每天投入多少个人,就是如果测算 ROI 的话,需要跟客户去了解一下这个信息,他每天做这个作业有多少个人去做,然后包括人的薪资等等。
现有搬运工具
就是了解一下他现在有人工地牛还是电动叉车,还是人工推车等等。我们可以看到他现场的一个用什么东西去搬,说白了我的AGV 跟他现场的车去搬的话。比它的优势点在于哪,这个可以知道我们怎么去推 AGV ,比传统方式强在哪里?
搬运货物
初期我们跟客户聊业务流程,聊完业务流程这些东西之后,我们就要看他搬的到底是什么货,我们选车的话要看搬的是什么货,然后我们才能选出来是什么车。
所以说货物名称包含:成品、半成品、原材料等等。
货物宽度
货物宽度就是机器人对接面,指的是我进叉面的宽度。然后最大的长度是指的这个面叫沿叉面,进叉面,沿叉面。然后货物最大的高度是看货物总共我要搬的货有多高,因为涉及一个什么事,我进行货物搬运的时候。如果我们标准车的导航、激光雷达都是一米8的高度,如果货物两米2高,那我导航激光是不是照不到后边了?所以说了解货物最大高度是多高,可能我要去根据货物的高度,把雷达激光去做加高的设计。
货物颜色
我们要看一下常规颜色或者黑色反光玻璃等,黑色的话折射率比较低,而反光的话折射率又太高。我可能相机或雷达可能不一定能全部能检测的清楚,这个货物玻璃的话也一样,玻璃是透透光,激光可能会穿过玻璃,会打穿过去照到后边。
货物满载的总重量
就是说通常我们说货物最大的重量不超过多少吨,这个比如说我货物重量1.1吨,那我用一吨的车就不行了,对不对?
货物缠膜
缠膜的话指的是什么?就是他们会货物通常做成品之后会在外面缠绕塑料膜。有的操作不规范,那个塑料膜会缠到这个进叉口上面,而我的货叉是有那个红外激光的,当激光检测到这个薄膜的时候,会视为检测到障碍物,那我没有办法去取货的。这个时候,我们的优选方案是规范客户缠膜的话不要挡到进叉口,不要影响我们去插取货。
货物超托
超托是货物会突出托盘。通常左右超托的话一般超一小点,比如说50毫米,这样是什么影响都没有的。然后前后超托影响什么你知道吗?影响载荷中心距,所以会涉及到我要选什么样的车,所以超托情况一定要注意。
最好我们建议客户摆放不超托,因为一个是刚刚说的那个影响载荷中心距,另外一个它超托了,都比这个托盘大了,它可能掉落风险是不是相对来说就增加了?
我们刚刚说了货物,然后再来看载具
载具的话常见的川字托、田字托,料车等。而川字托的话我们也要看取货是从开口面还是闭口面取,开口面指的是川字的这一面,闭口面指的是田字的这一面。
我们要去看我们的这个载具是什么,然后载具的颜色是什么,就像刚刚说的黑色、不锈钢等颜色一定要特别注意。
然后就是机器人的对接尺寸
这是一个很关键的信息点,进叉面每一个孔位的数据到底是多少?这个很关键,他关系到我选哪一款车,关系到货叉的外间距等信息。
托盘车你们可以看一下参数,比如说一款车的最大举升高度是130mm,如果你的进叉口高度是150mm,那我都举不起来这个货物。
刚刚讲了高度,现在是宽度,这个的宽度值 W2的这个宽度值,这个 W2的宽度值如果是800mm的话。那好,我的货叉外间距是680mm,是不是就可以正常叉取?因为800减680还有120,两边相当于各有60mm的安全空间。
然后另外 W3的间距是什么?再讲一下它的重要性在哪?我的两个货叉外间距如果是680的话,那我货叉内间距你知道吗?我货叉的内间距是不是就是320mm?如果我 W3是300mm,那就没有办法正常叉取了。所以说这几个数值都很关键,很重要。
如果是田字托,进叉口的高度也同样很重要,如果这些数据没有收集到的话,我们把AGV卖给客户,到了现场后AGV没法插取货物,那这个项目就完了,所以说这个是很重要的。
另外讲料架跟料车
料架跟料车常见的是两种搬运方式,一种是叉车直接去插取,另外一种用潜伏车去举货。两种方式我们要看料架的一个底面。用叉车搬运的话料架相当于川字托,我们要量的数据是一样的,量这些口的一些进叉面的一些数据情况。一般如果料架的底部高度比较低,我们就可以用托盘车搬运,如果料架或料车的底部高度比较高,就可以使用潜伏车或堆高车区搬运。
然后我们再看这个带轮小料车
带轮的料车也是相当于川字托,但是有一个问题点在哪?在于它的轮子看它是万向轮还是定向轮。它如果万向轮,我要量的间距是两个轮中间最小的这个距离值。就是我轮子不管怎么转,我得去量整个进叉面的最小宽度值。
然后就是搬运起点
刚刚讲业务流程,从哪搬到哪,搬什么货,载具是什么。现在我们再看搬运起点,搬运起点通常我们要看它是平面地堆库,还是货堆货,还是工装台、输送线、货架等。
比如说平面库位,那我基本上可以判定了使用平面搬运车就可以。
货堆货的堆叠,我们现在做堆叠的用基本上推前移车,当然平衡重车也可以去做,但是 前移车会更好一点。
然后工装台、输送线、货架等。一看到这个就知道平面搬运车就做不了了。我都得选择堆高车了,也有可能是平衡重车等。
横梁式货架是最常见的,而遇到其他类型的货架时,比如移动式货架、驶入式货架、重力式货架等,一定要多去测量数据,多拍照,评估能不能去做。然后就是还要看客户的需求到底是什么,要了解清楚。
作业巷道宽度
这个也是一个很重要的点,为什么我们要用CAD去模拟叉车的转弯情况,就是要看现场的作业巷道空间到底可不可以满足我叉车的正常运行。
而且要注意一个带你,每一个区域它的巷道空间可能都可能是不一样的,这个一定要注意一下。
比如说客户这个区域是几排货架,可能前面两三排货架巷道空间都很大,但最后一排货架空间可能会很小。而且还可能会涉及承重墙等建筑物影响我的巷道空间。所以我们尽可能的所有的整个点位区域,我们都去转一圈,都去看一下。
机器人对接尺寸
比如说我们搬运点事输送线、工装台这种。我们都要调研我们对接设备的尺寸是什么。
可以看到我们对接输送线,我们要看几个值,第一个 L1,这个值影响什么知道吗?第一是载荷中心距,第二是货叉的长度。 L2的值是什么?我除了平衡重和前移车,其他的车都是有支腿的。我要在输送线上面去取货,那车的支腿总要有地去进,下面支腿空间够不够支腿的进入。
如果下面没有空间的话,进不了支腿,那我可能就要用平衡重或者前移车了。但是成本又会增高了。然后是H1和H2这两个值,先来看 H1这个值,H1这个值关系到啥?就是取货时需要举升的高度是多少?另外一定要注意一点,有的输送线上面可能有会有一些防护装置,当我把这个货举起来之后,如果货物底部和防护装置的高度是相同的,那货物就会直接就撞到防护装置了,就无法正常搬运了。H2这个值是举起货物后,顶部空间是否有障碍物影响正常取放货。
再来看W1这个宽度,如果w1是600毫米的话,正常支腿还是进不去?我要么是支腿比它还宽把他包住,要么是小于W1可以正常进入到输送线底部。
再来看精度值,当货物在输送线上时,它其实距离输送线两边是有一个缝隙的,一般不会跟输送线两边紧挨着。如果我们放货的时候那肯定什么影响都没有,因为空间越大对AGV来说精度要求就越低。
但是我取货的话,它如果这个精度值两边各有30mm的话,AGV 还是到这个点位,但其实输送线输送过来的货往侧边偏了30mm,那我是不是有可能就取不到这个货了?
所以放货的时候宽度越大对AGV的要求越低,但取货的时候宽度越小对AGV的要求越低。如果难度较高就需要我们去引导客户进行输送线的调整已满足AGV的正常搬运作业。
关于对接货架区域
我们需要勘察的值就比较多一些。我们从左往右去看这张图,顶层横梁离地高度决定了我车我需要举多高,顶层横梁离地高度如果是4米5的话,那我的车需要设计的举升高度是多少?
客户说了,我最高层三层横梁离地高度4米5,你给客户设计可以举升几米的AGV?这个高度4米5,我取放货时货叉是不是要顶到托盘那个进插孔的边上,才能把取到这个货物,那你看这货叉高度是不是已经比4米5就高了?然后还要把货抬起来,才能把货安全的取下来,通常我们抬高200-300mm。所以实际设计的AGV举升高度通常要达到4米9。
如果是1米3的货,厂房顶6米高,那么举起货物后货物就会蹭到房顶,就没有办法搬运了,所以这个要一定要仔细记住这个点。
另外还有一种情况,AGV的门架有可能是比货要高的。那我是不是还要考虑门架到房顶的这个安全间距到底够不够?所以说每一个值都是很关键的。一个值考虑不到就可能整个设计出来的车就没办法落地了。所以说细节很重要,很关键。
货物突出间距W3这个值影响的是巷道宽度到底是多少,另外还有W4导轨宽,有的货架旁边会加一些防护的,这个也是同样限制了巷道宽度。再看背靠背的立柱间距 W7,这个距离要大于等于100mm。另外立柱与建筑物的间距 W8这个值也要大于等于100mm,其实跟这边是一样的意思。然后或与立柱的间距 W5、W6这种都要大于等于100mm,这是考虑到会有一个偏差值因此来预留的安全空间。
一层横梁离地高度H2这个值一般干嘛用?有的货架它一层有横梁是为了防潮,也有的货架没有一层横梁是直接放在地面上的。如果带横梁的话,我用堆高车,就要考虑支腿是不是可以从横梁下面插进去,看它高度够不够我进支腿,对不对?另外前移车前面有两个大轮子,要根据横梁底部高度、车轮高度、货物高度几个数据,来评估能不能正常取放货架1层的货物。
总结来说搬运起点就是根据各个点可能有一些刚刚说的输送线货架上的一些详细的信息需要我们去测量。包括地堆库,地堆库货与货的间距是多少?这个巷道的宽度是多少?
另外系统对接
系统对接指的是什么?我们和一些自动化装置做对接的时候需不需要做对接?通常输送线、机械手、堆垛机等,基本上我们通过协议去做对接比较多一些。而我们现在标准协议对接的话,像 Modbus-TCP、西门子的、欧姆龙的等。另外还有其他的有些协议是没做过的,就需要进行重新开发了,成本会比较高。像自动门、电梯等设备,通常是通过IO信号去对接的,一定要主要要与客户明确能否进行IO对接以及对接的要求客户能否满足。通常电梯是 IO 模块比较多一些,然后成本也比较低,协议对接成本会相对来说比较高。
任务下发
AGV是执行的点到点的任务的,通常就是给到调度系统以个点到点的任务,然后调度系统接收到任务之后再指派AGV去执行搬运任务。通常几种方式,第一种是客户有上层系统的,如WMS、MES、ERP等,我们可以提供标准API 接口支持客户进行对接,这种方式是最方便、最省事的。第二种是如果客户没有上位系统,我们要有一个库位管理系统去管理库位以及任务下发,通常我们会去用PAD去下发任务,平板配置好库位管理系统后给到客户,客户用平板去点击去下任务。但有可能是用按钮盒或者是 PDA,目前按钮盒和PDA相对来说比较少一点,因为对于复杂库位使用PAD拥有更高的便捷度以及可视化管理。
途经点
我们知道搬运起点是在哪,搬运终点是到哪,然后就要确认AGV从哪条路走,我们要看整体的走的这些路,观察地面是否满足AGV运行要求,没有勾缝隙,是否需要跨楼层坐电梯,有没有自动门要过,有没有风淋门,或者有没有一些轨道什么的需要AGV通过的。另外还要注意一个点就是场地限高,AGV的运行过程中有没有限高区域。比如说要途径一个门,门的高度1.6米,AGV的雷达1.8米,那是不是就过不去了?所以我要把门的高度提前量出来,如果不满足AGV的通行,可能就要调整AGV或者调整门高来适配现场的一个运行。
电梯对接
我们需要看几个数值,W1的值,电梯门最窄、宽度多宽?我车带着货能不能通过?然后内部 W2,内部宽度是否足够?W3是长度,车夹着货,整体多长?这个电梯能不能装得下?另外一个值 H1,跟H2这个高度值,我的AGV整体高度1.9米,电梯门或者里面轿厢两个最低值是多少?要考虑AGV能不能进得去?AGV与电梯门最少要有一个200mm的安全余量,因为可能考虑到地面平整度,或者是缝隙等情况。然后这两个很关键的值,W4跟 H3,W4是电梯的缝隙间距,这一个标准值通常要小于等于30mm。
如果大于等于30mm的话,风险就会增加,我们建议客户去调整。 H3的值是什么?一定要记住,这个叫电梯满载情况下的沉降高度,这个值就AGV搬着货物在电梯里时,电梯与地面的低差,这个值要小于等于3mm。如果大于这个值也是建议客户要去调整的,让可以客户告知他们的维保单位去调。
关于电梯对接我再补充一下,电梯对接通常 IO 模块去对接比较多,可能有一些项目电梯只支持协议对接,那我们就通过协议去对接,但需要客户把协议提供给我们进行评估。另外通常 AGV 对接电梯的话,为保证使用的安全性,我们都要建议客户专梯专用,只供 AGV 使用。然后有的客户有感应门,那感应门我们用 AGA 可以不对接吗?感应门我们也要去建议客户进行对接,因为感应门也有感应不到的可能性,我们套尽可能的把风险降到最低。风淋门的话一般无尘车间会存在风淋门,整个相当于两道门形成了一个密闭空间,我们从一边进,再从另外一边出。所以风淋门跟电梯的要勘察的这个空间差不多。另外风淋门的话内部可能是没有 Wifi 信号的,需要客户去加AP的,包括电梯内部也是一样,电梯内部也需要有信号,不然AGV 没有办法跟调度系统做通讯。
RGV就是比较老式的轨道AGV,通过轨道导航行走。轨道的话一般我们看什么?主要是看缝隙值跟高低差,来确保AGV能不能通过。
搬运终点
我们勘察的东西和搬运起点是一样的。
最后整个调研表我们重新再从头梳理一下思路。
所有的现场环境如果到了现场怎么去看?基本上这些东西我们边和客户沟通的时候边去观察的,还有的就是像客户询问一些信息,可能要问我们去问客户到底是怎么样。
通常我们到了现场跟客户交流,客户一定会按他的思维逻辑去来,他的思维逻辑是什么?就是整个我的要搬运的货物是什么,搬运作业的任务是从哪边哪个点去搬运,然后往哪个点去搬什么东西。
所以基本上都是先看搬运流程是从哪到哪,然后再去问客户我们搬的东西是什么?然后货物的载具又是什么,这些信息都是用来评估我们能不能搬这个货物的,当我们知道能搬运这个货物时,就要知道从哪搬,搬到哪里。
我们知道从哪里搬货物,又知道我要搬到哪,然后要去搬运终点的时候,我们中途就要经过一段线路,所以在去往搬运终点的过程中,我们就会清楚整个途经路线的情况。遇到哪些途经点时我们再去测量一些需要的参数值。最后再到搬运终点,明确往哪放?地面?输送线?货架?叠盘机等等。有什么一些需要测量的值?客户的思路一定是这样的,所以说基本上现场勘察的顺利就是这样顺下来的。整个任务都清楚了,那我们就要和客户确认清楚依靠什么方式去下发任务。再剩下的信息就全是靠我们去问,还有我们自己去看。把这个思路捋捋顺了之后,细节的东西看的多了,慢慢就会很清晰了,这个就是整个现场调研。
